how their self-driving car can avoid a
bicycle rider.
Google released an update on their self-driving car project today that put a special emphasis on the cars’ ability to detect and maneuver around bicycle riders.
While driverless cars have had widely publicized success in their ability to navigate open roads and freeways, dealing with urban traffic is a whole different ballgame. In today’s update, posted on their official blog, Google says they’re well on their way to “mastering city street driving.”
Here’s more from the blog post:
Jaywalking pedestrians. Cars lurching out of hidden driveways. Double-parked delivery trucks blocking your lane and your view. At a busy time of day, a typical city street can leave even experienced drivers sweaty-palmed and irritable…
A mile of city driving is much more complex than a mile of freeway driving, with hundreds of different objects moving according to different rules of the road in a small area. We’ve improved our software so it can detect hundreds of distinct objects simultaneously—pedestrians, buses, a stop sign held up by a crossing guard, or a cyclist making gestures that indicate a possible turn. A self-driving vehicle can pay attention to all of these things in a way that a human physically can’t—and it never gets tired or distracted…
As it turns out, what looks chaotic and random on a city street to the human eye is actually fairly predictable to a computer. As we’ve encountered thousands of different situations, we’ve built software models of what to expect, from the likely (a car stopping at a red light) to the unlikely (blowing through it). We still have lots of problems to solve, including teaching the car to drive more streets in Mountain View before we tackle another town, but thousands of situations on city streets that would have stumped us two years ago can now be navigated autonomously.
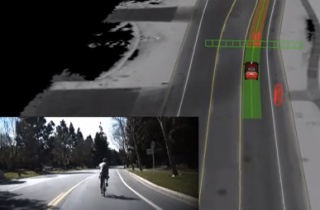
There’s also a short video that shows a computer simulation and live camera view of the self-driving car in action. The video includes a scenario of the car moving past two people on bicycles.
Here’s how the narrator explains the interaction:
Our cars treat cyclists as a special category of moving object. When a cyclist holds up his arm. Our software detects his hand signal and predicts his movement into our lane. The car knows to continue yielding to the cyclist passing by, even when he changes his mind multiple times.
The video also shows a potential right-hook situation, with the bicycle riders coming up alongside the car as it waits to turn right. The software seems to easily detect that approaching riders and waits for them to go by before making the right turn.
Google says their smart, self-driving cars will lead to city centers, “freed of congestion from cars circling for parking” and will result in safer roadway interactions. “With every passing mile ,” says Google, “we’re growing more optimistic that we’re heading toward an achievable goal—a vehicle that operates fully without human intervention.”
This is all pretty amazing stuff; but of course it’s coming from a company that stands to make millions if this new technology ever becomes widely used. When Aaron Naparstek, noted livable streets advocate and founder of Streetsblog read that Google’s software could turn a chaotic city street into something “fairly predictable,” he tweeted, “Not buying it.”




Thanks for reading.
BikePortland has served this community with independent community journalism since 2005. We rely on subscriptions from readers like you to survive. Your financial support is vital in keeping this valuable resource alive and well.
Please subscribe today to strengthen and expand our work.
I know it’s about an hour long but you need to watch the longer version of this from Google that is 2 or 3 years old at this point; the Embedded Linux Conference 2013 – KEYNOTE Google’… @ http://youtu.be/7Yd9Ij0INX0 is a reasonable approximation. Goto 19:10 to see what the car does at a 4-way stop. I dare you to prove that human drivers are as consistently conscientious as this 3 year old self driving car is 100% of the time.
H@ters gonna h@te but if you truly believe that drivers are responsible for collisions when they are driving their cars then we owe it to ourselves to once again automate driving. Like so many other tasks throughout history we’ve proven that a minority of people are capable of being safe 100% of he time while most of us are not. Let us not sacrifice the safety of all for the convenience of the few.
I cant wait for these for become mainstream. I would trust one of these over your average human driver any day of the week.
I hope they are also programming them to look out for skateboarders!
🙂
Optomistic predictions put a level 4 vehicle 10-20 years out. We’re already seeing level 2 vehicles in higher-end cars – this is where they combine passive control with active monitoring and do things like braking for a dart out or vehicle stopped ahead, as well as lane maintenance.
It is interesting to think of ways to pair together this technology and the heatmap data that Strava put together (see this week’s Monday round up). Maybe these Google cars will steer themselves away from greenway streets that are clearly loaded with non-auto traffic.
I’m cautiously optimistic, but still curious about liability and how they decide to make the best of a bad situation. It seems to me like there are some serious ethical decisions to make when programming these things.
Most states will need to adjust current laws to accomodate liability – owner versus product manufacturer, and it’s likely to be a shared liability – but once that is sorted out, market forces are likely to push toward the safer alternative. Those that choose to rely on internal systems to operate a vehicle are likely to face a premium from their insurer.
The rule is to anticipate bad situations, and avoid them. There’s not too many hypothetical scenarios that don’t translate, viewing the law pedantically, as “driving too fast for conditions” (which humans do far more often than is prudent).
Cool. I hope they put in a subroutine so it recognizes an elbow flick and pulls for a little while 🙂
I’m all for safer drivers, automated or not; but it will only further entrench single-occupancy driving. The carbon footprint of these cars could only get better because of less erratic (gas/electricity-burning) behaviors – but that’s not worth much.
One the discussed side benefits is how this technology will enable car sharing. It would much more efficiently coordinate the use of vehicles so that fewer would be just sitting and waiting to be used. they could also be stored more remotely.
It might enable car sharing, but my model of the early adopter is someone who is relatively wealthy (these cars won’t be cheap, will they? at least not at first) with a long commute. Or perhaps someone in regional sales, that sort of thing. It would make car sharing easier, but if the car owners aren’t motivated to share, it won’t happen.
A few things to remember: the safety bar is really, really low. Humans are terrible drivers, typically, so it won’t take much sophistication for machines to be a net gain to society, safety-wise. Also, self-driving cars could spur “mobility as a service”, i.e., on-demand Car2Go. This would cut car ownership a lot, and likely reduce the number of trips in cars, since why own the cow when you can get the milk for free? For city cyclists, the future could, theoretically, be fewer, safer cars on the road, and more transportation options for less money. Here’s a good essay on the topic.
http://daily.sightline.org/2013/06/04/a-self-driving-future/
I joke to naysayers that drivers’ auto insurance rates are set by drunk Homer Simpson analogs and the uninsurable. Self driving systems are already better than that.
This low standard our corporate plutocracy has set is for profitability, which is the only thing that mandatory driver insurance is about, right?
From the historical files of planning and road regulations…perhaps in the first phase Google Cars will be required to have a big “G plate” (vs a red flag which Google would fight) on the their front and rear…much as novice motorists have in some countries…this could be very helpful for other drivers to know how to anticipate the actions of the vehicle’s “operator” in front of them…especially “super legal” “drivers”.
After watching the video of a Google car drive “super legal”, especially through intersections or across RR tracks, I can foresee “drivers as humans” of the following vehicles very likely rear-end the Google vehicles (or a Apple or a Samsung) “computer as driver” at much higher rates than would be typical of today’s existing conditions. Currently most drivers following another driver through an aerial suburban intersection will close the gap and follow them through a yellow or orange/ red signal if the other legs are all stopped. Seeing a Google car “G plate” in front of the driver’s car would then communicate to the human driver to expect a super legal movement much as one following a student driver today. This assumes the Google car has not already hacked into the following car’s tech and told it to “back off”.
Plus the “G plate” would let a driver know that honking the horn is useless and that flipping the car off is safe. A hybrid of the existing situation today.
I think it only takes a few of these on the roads to set a good example for other drivers of how to be patient and legal. Maybe the ad campaign is “can you drive as well as your car?”
Like the difference between N Vancouver and N Williams. The both have about the same amount of traffic, but Vancouver consistently runs about 5 mph slower because Williams has two lanes and the impatient can pass the law abiding.
Yes, we in the street design biz call traffic in the one lane street layout as, “rolling speed humps” since the prudent driver sets the pace vs. the two lane layout that fosters weaving and higher speed passing, as drivers avoid stopped left turning cars and drivers driving the speed limit in front of them.
I prefer less corporate control over my life. You can bet the disclaimers and lawsuit armor will be massive.
Which computer do you use? Phone? People choose based on personal benefit and costs.
Hard to believe that this isn’t already safer than the woman who nearly hit me in the crosswalk at fremont and 74th by the safeway last thursday. She was on her phone and was so distracted she never saw me. Honestly the biggest barrier to adoption is going to be that people won’t want a car that obeys speed limits and stops at yellow lights.
some cool ideas they are coming up with but what about all those unknown factors that are beyond control such as when for example the auto pilot car approaches a construction zone and wishing to change over to the left lane, finds out there is some road rage fueled jerk that refuses to let the car over? Or what about stopping at an intersection to allow pedestrians and cyclists to safely get through before proceeding but instead is cut off by some impatient driver who goes around on the left and then right hooks the auto pilot car because the impatient driver does not wish to wait? These are just a couple of examples I see on a daily basis out of millions, maybe even billions of other possibilities. Sure I might feel a little safer around auto pilot cars but less safe around the road rage these law abiding cars might generate in the less impatient human motorists.
I think it’s ironic that these “law-abiding” cars have passed me at 75+ MPH on I-85 northbound on more than one occasion – I’m guessing not on “auto-pilot.” A few months ago I witnessed one of their well-marked shopping delivery vans doing nearly 50 in a 35 and drifting over the fog line repeatedly. As someone who worked on imaging systems in experimental autonomous vehicles about 20 years ago I can hardly wait for computers to take over driving!
“drifting over the fog line repeatedly”
The algorithm is attempting to make the cars as ‘true to life’ as possible.
Did you watch the video?
Please can we have these yesterday? The number of lives that will be saved, the fuel saved, the efficiency increase of roadways… wow, much better.
We can’t get these vehicles soon enough!!
I believe as the computer driven cars take over the mundane task of driving accident rates will plummet and car crashes will almost exclusively involve cars driven by humans. The biggest risk cyclists will face is each other (fortunately cycle on cycle crashes are rare) and not 4,000 pound umbrellas. I also look forward to being able to pay a monthly service fee to have a car on demand to ferry me where I want to go without worrying about the hassles of car ownership and parking.
A brilliant idea if it can reduce the romance, the emotional content, of driving and put it on bicycles where it belongs!
Someday we may have thousands of driverless Smart-size electric cars, strictly obeying all speed limits and road rules, coming when summoned, carrying people where asked, picking up the next person without ever requiring a parking space, not right-hooking cyclists or running over children, each ride much cheaper than a manned taxi, and recharging as needed.
This would:
– Reduce traffic speeds for all cars, manned or robotic
– Reduce the need for parking, allowing more bike lanes, street seating, urban parks and buildings, and reducing the cost of housing development
– Reduce the money that people devote to buying, maintaining, and insuring private cars
– Reduce traffic congestion, with fewer accident bottlenecks and closer car spacing
– Increase the mobility of the elderly, disabled, and heavily laden
– Increase the safety of our streets, for everyone
– Increase the use of transit, by carrying people the last mile from bus or MAX station.
– Increase the move to electric cars, as a robot car only needs enough range for local driving and doesn’t have range anxiety.
If desired, the robotic car fleet could also
– Discourage long solo car trips, through pricing disincentives
– Encourage ride sharing, through pricing incentives
– Help catch dangerous human drivers, with cameras recording accidents and near-accidents
It could be among the most important advances of the century.
Followed closely by the robotic bicycle.
I was excited too, until I read that Aaron Naperstek isn’t buying it. He must have some expertise…
A Robot That Balances on a Ball.
Rpbots built on Segways as a mobility platform.
Aerial drones are only efficient whete there are no good travel surfaces.
Mass motordom relies on a loose interpretation of the road rules. The strict interpretation demanded of robot cars will make them slow and tedious as cyclists and pedestrians realise they can use street space with no fear of the conservatively programmed robots.
I look forward to it.
Society is already that way, to a certain extent, and always will be. Civil disobedience is what you are describing – sit ins, critical mass, etc. The current rules only work now when we choose to comply. Signals and stop sign don’t make anyone safe, it’s the users agreeing to follow the rules that does.
The users follow the rules? Maybe where you live.
How failsafe will a smart car be? If its advanced system isn’t working @ 100% will a smart car go dumb or continue to operate at risk for cyclists and pedestrians?
Whenever anyone asks such a question, the best answer is ‘Compared to what?” Or by responding, “Compared to current conditions……
“…stands to make
m[b]illions…”That’s better.
The Google claims are ramping up. I have yet to see, though, any claim that their cars will stop for pedestrians waiting at the side of the road at a legal, unmarked crosswalk. I have yet to see an acknowledgment that the Google programmers even know the law in this respect. Perhaps those are the “jaywalking pedestrians” they mention in their press release. I’d also like to see them drive in an urban area, as opposed to Downtown Mountain View.
A simple search on YouTube of Google self driving car pedestrian will show several videos that address this concern.
In particular there is a video where the car is attempting to make a left turn at a signaled intersection. While waiting for oncoming traffic to clear the opposing crosswalk is in use. Once vehicular and crosswalk traffic cleared the car stared moving only to suddenly stop inches after it started; a person entered the crosswalk at a dead run from the car’s left where most human drivers wouldn’t have been expecting a pedestrian let alone one running across the road with seemingly no regard for his own life.
—————————————————————————————————————
Google has never issued a categorical “claim” that their or anyone else’s self driving cars will be 100% accurate at all times. The simple fact of the matter is that computing power has caught up with humanity’s self imposed no-win scenario of driving. The human brain was not designed for the attentiveness and skill required. That there aren’t more crashes and fatalities is luck: luck that a minority are capable and luck that the rest of us can blunder around a road system that attempts to mitigate the damage cause by the rest of us.
Thanks. I’ve seen a few videos of self-driving cars. None of them address the issue of a pedestrian, who is not in the path of the car, standing just off the curb at the side of the road, waiting for the driver to stop for them at an UNMARKED crosswalk. None. If there is one I would like to know. I personally believe the programmers do not even know the law, since it’s not in their driving experience.
Walkers should not have to proceed into the path of the Google car in order for it to stop for them. How would they know it’s a Google car? A real driver very well would not stop for them.
Re: Above. I realize that Google says they have driven their cars in downtown San Francisco. (Do they know drivers are not supposed to pass a stopped streetcar or cable car that is loading or unloading, even if there’s a lane they could pass in?) I haven’t seen a video or other reports on the results, though.
How Google’s Self-Driving Car Works: http://youtu.be/YXylqtEQ0tk
About 15 minutes long.
Cue up to 8:15. It explains lane positioning and active avoidance of things like bicycles followed by the left turn scenario I expounded above (remembered runner’s vector incorrectly) and few other non-linear interactions.
The fun thing is that when, as a programmer, you break down complicated tasks in to simple sub-tasks you find that even human drivers routinely fail to do what is required by law more often than not.
Street cars/trolley cars: I’d treat them as part of the school bus hazard set like most road using & adjacent mass transit vehicles. The stopping for a street car rule sound identical to rules for passing a school bus.
Personally I’d ramp up a “behavioral” modifier when mass transit vehicles stop that preemptively slows or prepares to slow in expectation of pedestrians embarking and disembarking in a rush.
Except that the streetcar and cable car rule in California law applies to drivers passing the stopped streetcar/cable car on the RIGHT as well as the left, as both those vehicles on tracks in San Francisco, anyway, are in the left lane, and riders have to cross the right lane of traffic to get there or back.
Perhaps some day all bikes will have gps transmitters on them to warn traffic of their positions.